🏢 AC Dev Lab#
Note
If you would like to participate or are interested in contributing, please introduce yourself or reach out to gurpaul.kochhar@utoronto.ca.
The Acceleration Consortium (AC) Dev Lab is a remotely accessible facility that houses a diverse set of physical hardware for self-driving laboratories (SDLs) including liquid handlers, solid dispensers, Cartesian-axis systems, mobile robotic arms, and synthesis and characterization modules. Where possible, both educational and research-grade hardware are included. The AC Dev Lab is used to develop and test SDLs and to provide a platform for training students and researchers in the use of SDLs. The AC Dev Lab GitHub repository also acts as an example of setting up an autonomous laboratory.
Star Follow @AccelerationConsortium Follow @sgbaird Issue Discuss
The equipment in the AC Dev Lab can be broadly categorized in the following categories: characterization, prototyping, synthesis, dispensing, environment, and infrastructure. See the image below for an example of some of the equipment intended for the AC Dev Lab.

Here are some of the modules we have procured and are in the process of setting up (help wanted if you’re in Toronto!):
Name |
Image |
Qty |
Description |
Video |
|---|---|---|---|---|
|
1(+4) |
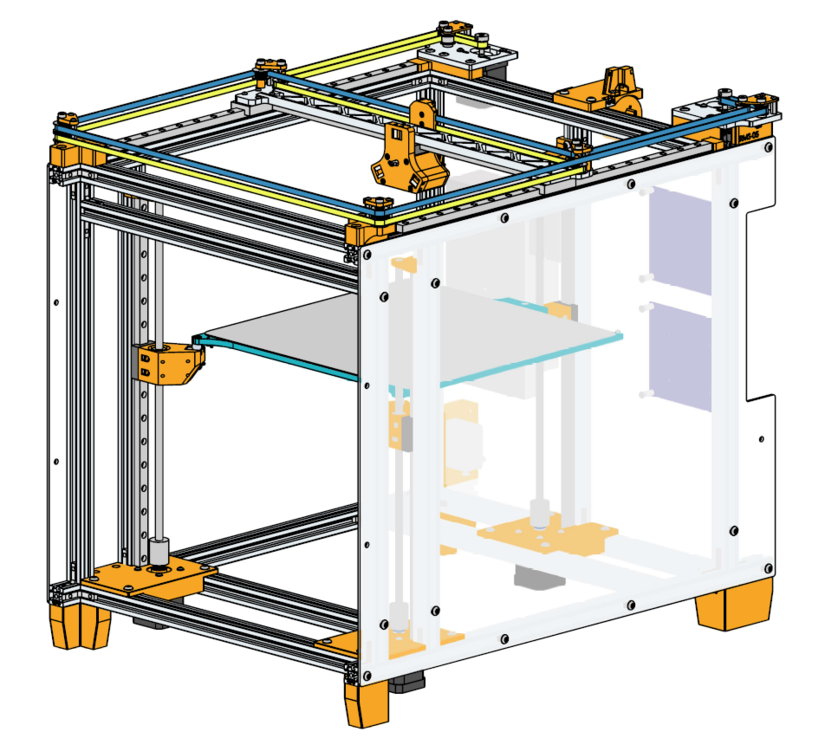
A versatile, open-source toolchanger with a large community of users and developers which is used for both general 3D printing and scientific applications. One nearing completion. Four more planned. |
|
|
|
2 |
A DIY open-source microscope with a fine-positioning, motorized stage. Reflection illumination version of Delta Stage |
||
|
1 |
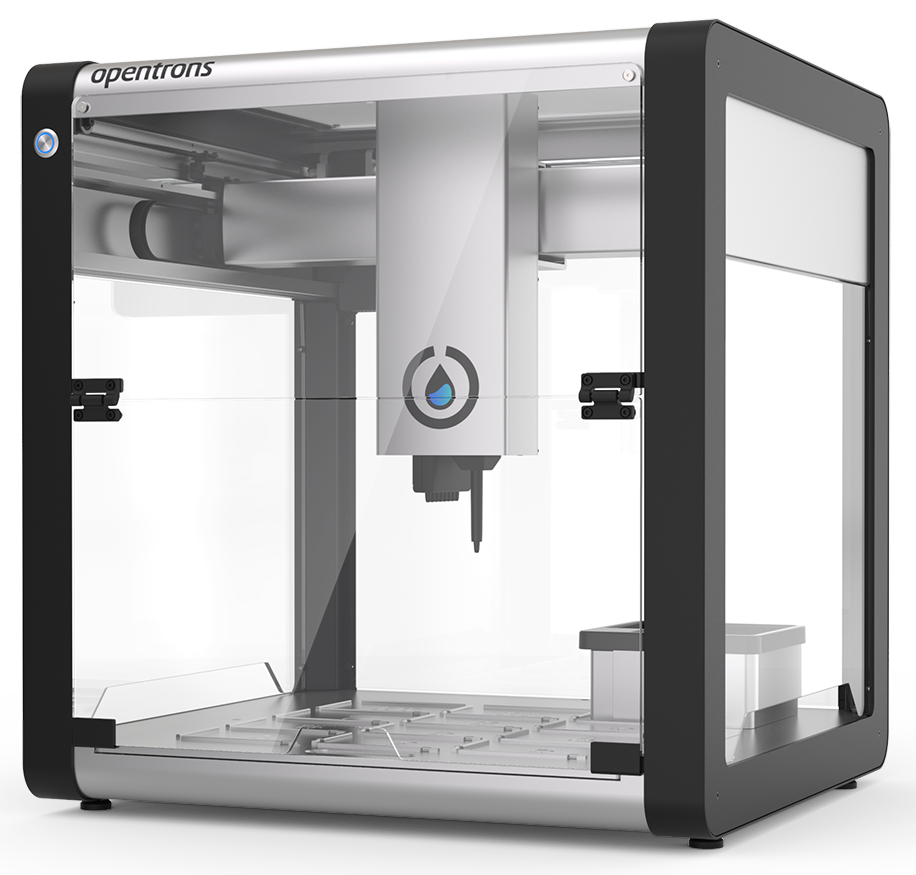
An open-source and cost-friendly commercial liquid handler |
||
|
1 |
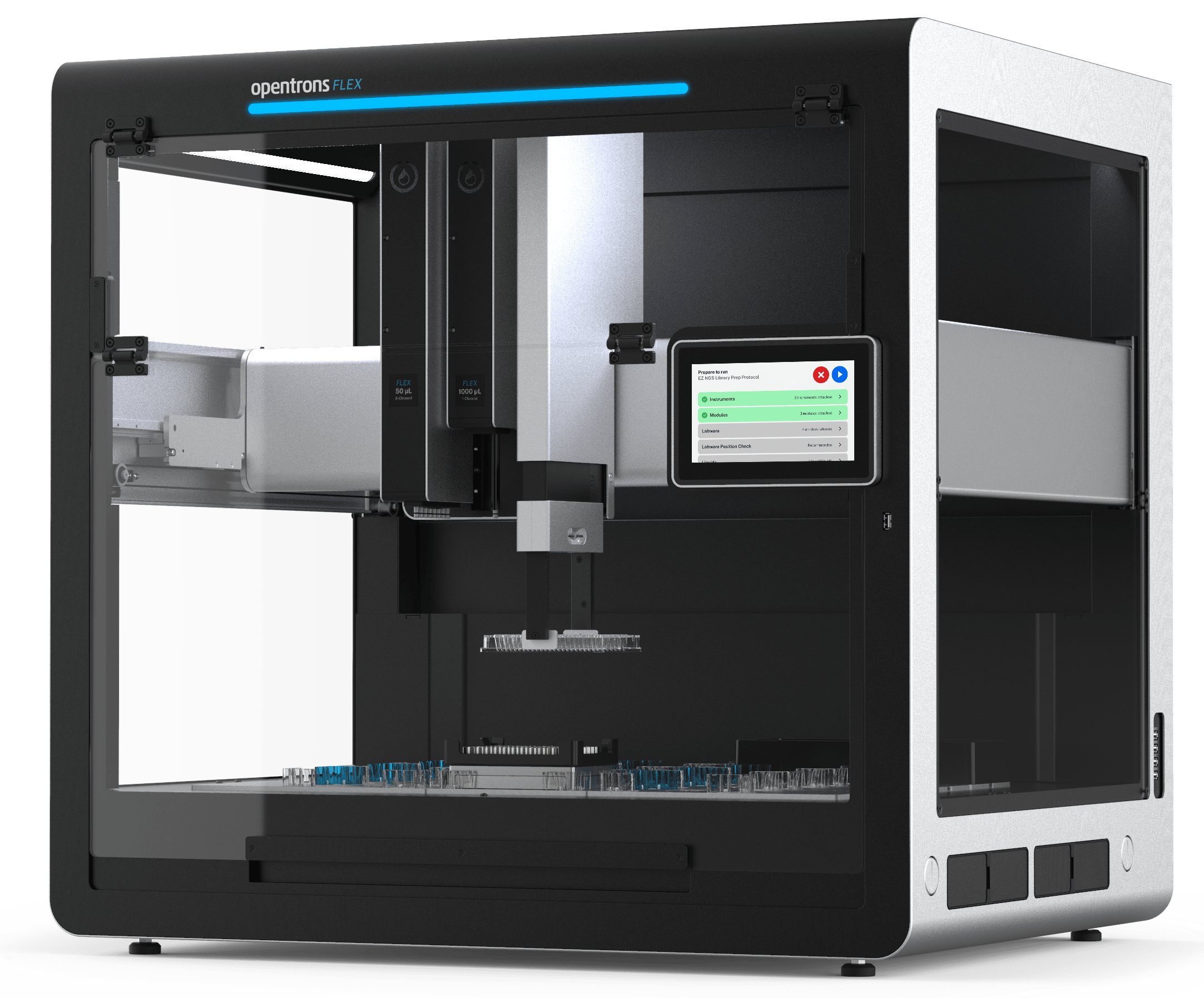
An open-source commercial liquid handler tailored towards high-throughput and advanced liquid handling operations |
||
|
1 |
An educational six-axis robotic arm |
||
|
1 |
An educational six-axis mobile cobot with a 3D depth camera and lidar |
||
MyCobot 280 and MyAGV |
|
1 |
An educational six-axis mobile cobot |
|
|
1 |
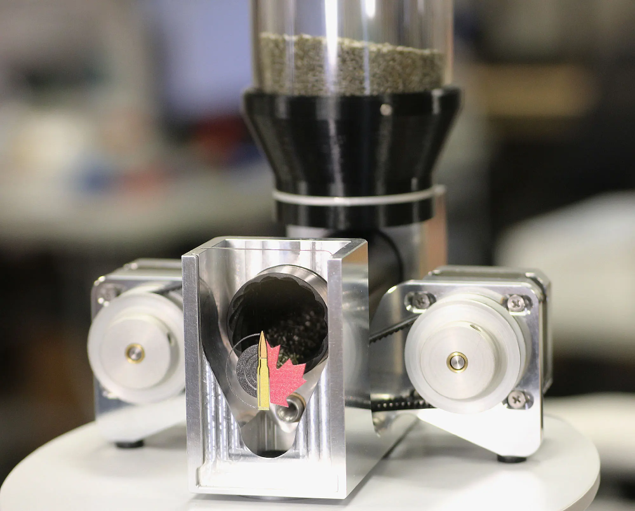
An automated solid dispensing station, usually marketed for ammunition reloading, but to be used as a general-purpose powder doser |
||
|
1 |
An automated solid dispensing station, usually marketed for ammunition reloading, but to be used as a general-purpose powder doser |
||
|
1 |
An automated solid dispensing station, usually marketed for ammunition reloading, but to be used as a general-purpose powder doser |
||
|
1 |
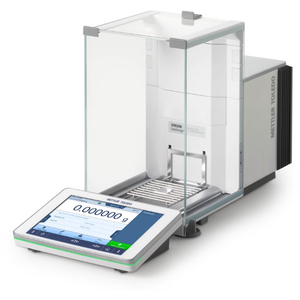
XPR105DU is a commercial, automated powder doser by Mettler-Toledo |
||
|
1 |
A commercially sold and mostly open-source chocolate 3D printer kit |
||
|
1 |
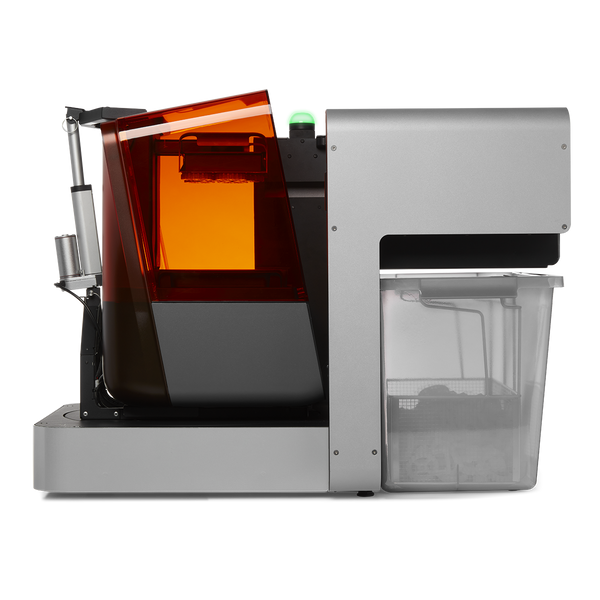
24/7 autonomous SLA 3D printer with camera inspection |
|
|
Form 3L package |
|
1 |
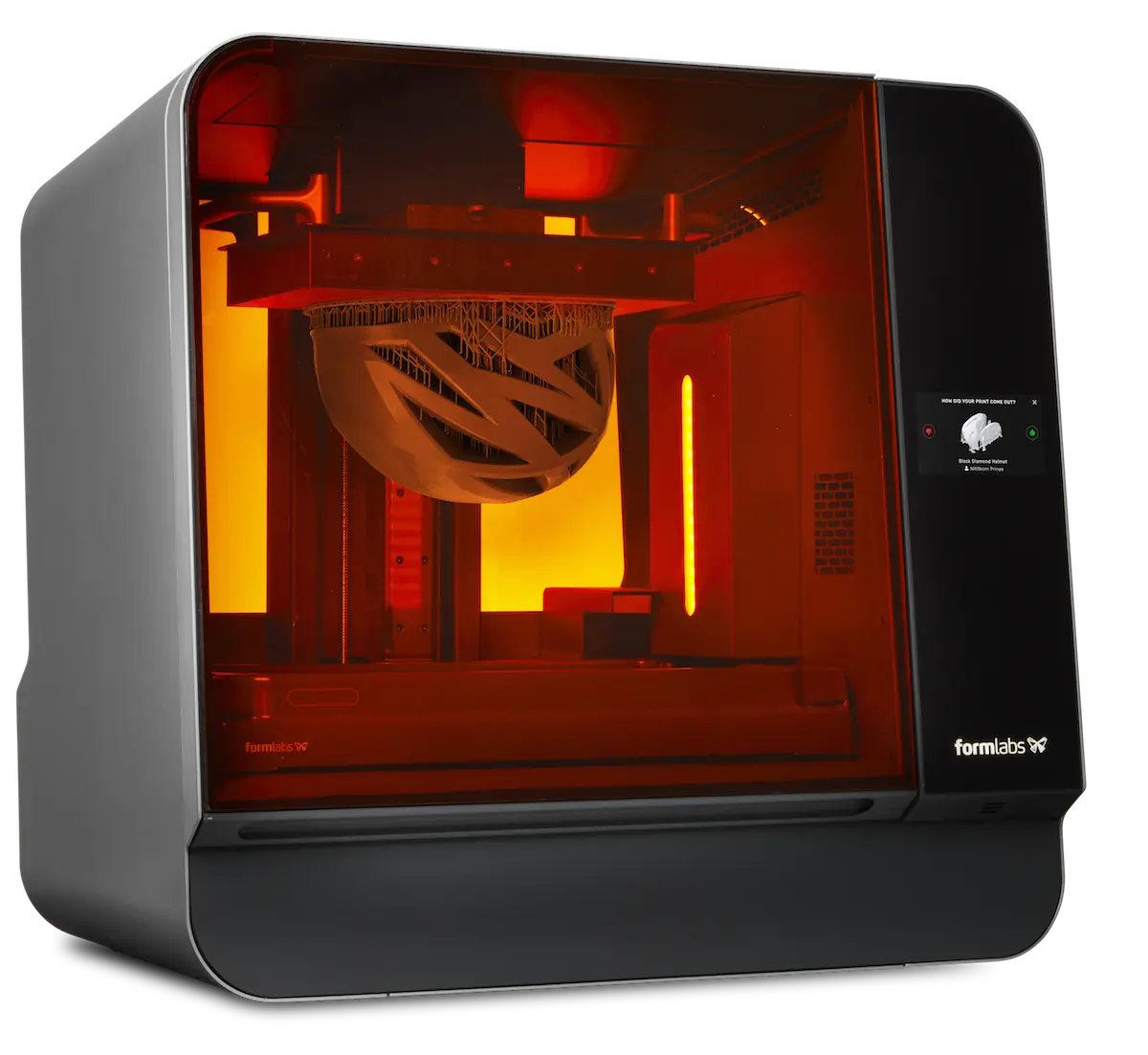
A large-format SLA printer with wash and cure stations |
|
|
1 |
A high-performance multi-color FDM 3D printer with air filtration, chamber heating, and WPA2-Enterprise WiFi support. |
|
|
|
1 |
An open-source automated turntable controlled by a stepper motor and designed for photography applications |
||
|
1 |
A DIY linear actuator-based syringe pump designed for easy handling by robotic arms |
|
|
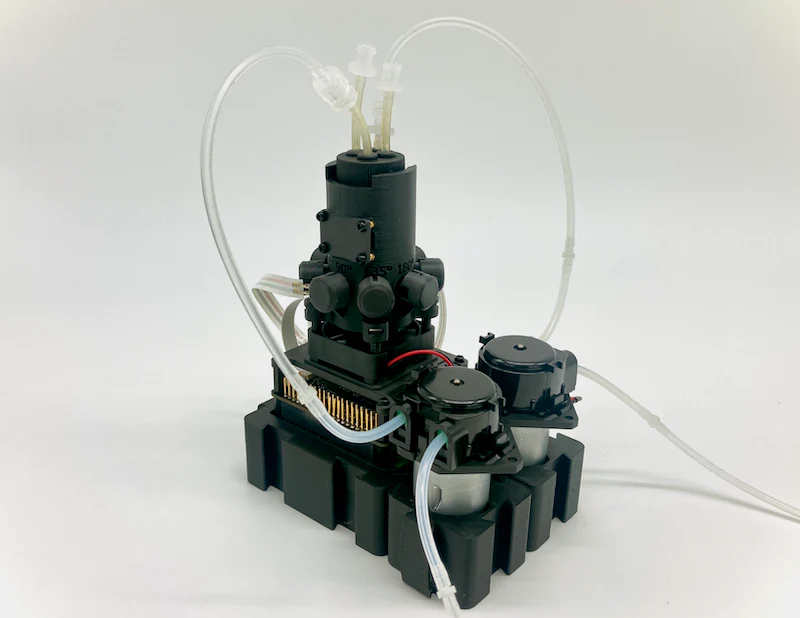
|
1 |
A commercially sold, open-source automated system with heating, stirring, liquid handling, spectrometry, and optogenetics characterization geared towards biological research |
||
|
2 |
A commercially sold, open-source automated bioreactor with heating, stirring, and optical density measurements |
||
|
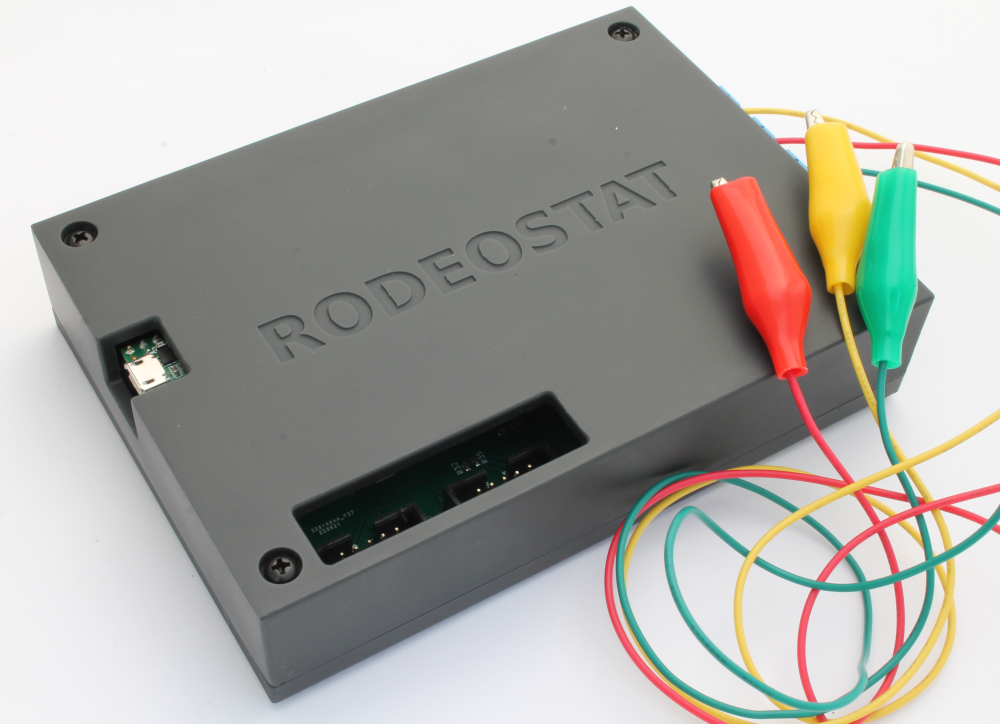
5 |
A commercially sold, open-source potentiostat for electrochemical experiments with current measurement ranges of +/- 0.001, 0.01, 0.1, 1mA. |
||
|
1 |
A commercially sold, open-source potentiostat for electrochemical experiments with current measurement ranges of +/- 0.01, 0.1, 1, 10mA. |
||
|
1 |
An entry-level research-grade potentiostat with eight ranges between +/- 10 nA and +/- 100 mA and a Python API |
||
|
1 |
A commercially sold, open-source pressure regulator for controlling pneumatically-driven microfluidic chips |
||
|
1 |
A commercially sold, open source set of introductory modular optics cubes for microscopy |
||
|
1 |
An automated vial capping and decapping machine by DH-Robotics |
|













Name |
Image |
Qty |
Description |
|---|---|---|---|
Mobile manipulator |
1 |
A research-grade six-axis mobile cobot with vision capabilities optimized for laboratory environments |
|
Desktop SEM |
1 |
A desktop scanning electron microscope (SEM) with Python integrations |
|
Chamber interfaces (TBD) |
- |
e.g., miniature glovebox, miniature ductless fumehood, small nitrogen generator |
|
Low-force tensile tester |
1 |
Low-cost, open-source tensile tester. Examples [1], [2], [3], [4] |
Unit Operations#
The AC Dev Lab provides a comprehensive set of unit operations for materials research and education. These operations span dispensing, liquid handling, characterization, synthesis, and automation capabilities:
Dispensing and Material Handling#
Solid dispensing (trickler-based) - Large volumes with 1 mg and 0.1 mg accuracy (AutoTrickler v4, ChargeMaster Supreme, Ingenuity Powder System)
Solid dispensing (Mettler Toledo) - XPR autodoser system with 0.01 mg accuracy (MT Powder Doser)
Liquid handling - Precision liquid handling via OT-2, OT-Flex, Digital Pipette, and peristaltic pumps
Viscosity estimation - OT-Flex pipette pressure sensor with custom algorithm
Synthesis and Processing#
Bioreactor chamber - Heating, stirring, media exchange, gas flow, optical measurements (Pioreactor, Chi.Bio)
FDM 3D printing - High-performance multi-material filament printing (Bambu Lab A1 Mini)
SLA 3D printing - Stereolithography resin printing (Formlabs 3L, Form Auto)
Chocolate 3D printing - Food-safe 3D printing (Cocoa Press)
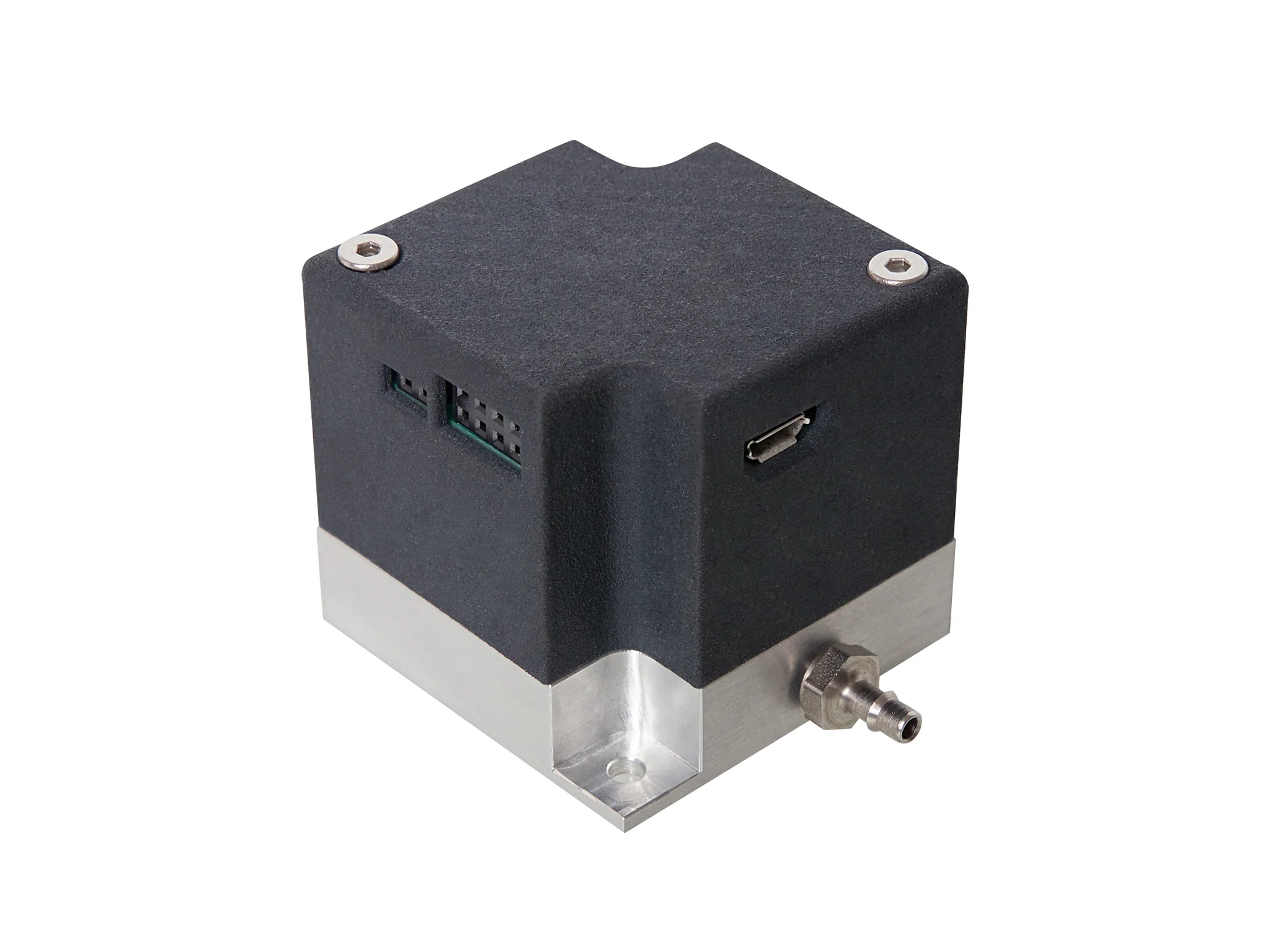
Laser powder bed fusion (LPBF) - Metal 3D printing (AO A30 Metal 3D Printer)
Characterization#
Electrolyte conductivity - Mettler Toledo sensor for ionic conductivity measurements
Automated transmission microscopy - High-resolution imaging (OpenFlexure)
Automated reflection microscopy - Surface imaging (OpenFlexure)
Scanning electron microscopy - Sub-micron imaging (Hitachi TM-4000II)
Potentiostat measurements - Electrochemical characterization including chronoamperometry, constant voltage voltammetry (Squidstat, Rodeostat)
Robotics and Automation#
Automated vial capping/decapping - DH Robotics capper/decapper demo
Vision-enabled 6DOF arm and gripper - Manipulation and pick-and-place (Elephant Robotics)
Automated vial turntables - Sample positioning and imaging (FluxGarage)
Equipment monitoring - Livestream cameras for remote observation
Workflows#
The AC Training Lab is intended as a hands-on sandbox and prototyping environment for researchers. Each workflow will either be dedicated (permanent) or supported (non-permanent).
Training Workflows#
Educational workflows designed to teach key concepts in materials acceleration and self-driving laboratories:
Name |
Description |
Hardware |
|---|---|---|
Hello World RGB color matching |
Light-mixing kits with microcontroller to teach basic optimization concepts |
LED controller, color sensor |
Liquid RYB color matching |
Food coloring mixing with wireless charging color sensor |
OT-2, wireless color sensor tool |
Titration using baking soda and citric acid |
Acid-base titration workflow |
Atlas Scientific pH meter, liquid handler |
Yeast growth optimization |
Biological optimization with optical density feedback |
|
Vision-enabled filament print parameter optimization |
FDM printing with real-time monitoring |
BambuLab A1 Mini with custom toolhead camera |
Vision-enabled chocolate 3D print optimization |
Food printing with custom vision modules |
Cocoa Press with toolhead camera / 3D reconstruction |
Mechanical property optimization of resin lattices |
SLA printing with tensile testing |
Formlabs Form Auto with custom tensile testing module |
Mechanical property optimization of 3D printed alloys |
Metal powder processing and testing |
Powder dosing, atomization [external], AO A30 metal printer, tensile testing [external] |
Large-scale image stitching of heart tissue |
Automated microscopy and image processing |
OpenFlexure transmission microscope with biology slides |
AprilTag image recognition for robot path planning |
Computer vision for robotic manipulation |
Elephant Robotics arm, camera, label printer |
Research Workflows#
Advanced workflows for materials discovery and optimization research:
Name |
Description |
Status |
|---|---|---|
Alkaline Catalysis Lifecycle Testing |
Adjust the stress-cycling conditions of a nickel electrode in a KOH solution to investigate the cause of catalyst degradation |
Ready |
Battery slurry viscosity optimization |
Using OT-Flex pipette pressure sensor and custom algorithm to optimize electrode slurry rheology |
Development |
Material recycling |
Incorporate the use of “waste” experimental samples as part of a recycling workflow using mixed red, yellow, and blue solid powders |
Development |
Dedicated Workflows#
While the equipment is not restricted to particular workflows, we are actively developing a subset of readily accessible workflows for the AC Dev Lab. Note that a single workflow could be carried out using different sets of equipment within the lab. These workflows will use dedicated hardware in a permanent setup to allow for 24/7 access. The core workflows that are planned, in development, or available are listed below:
Name |
Diagram |
Description |
Status |
|---|---|---|---|
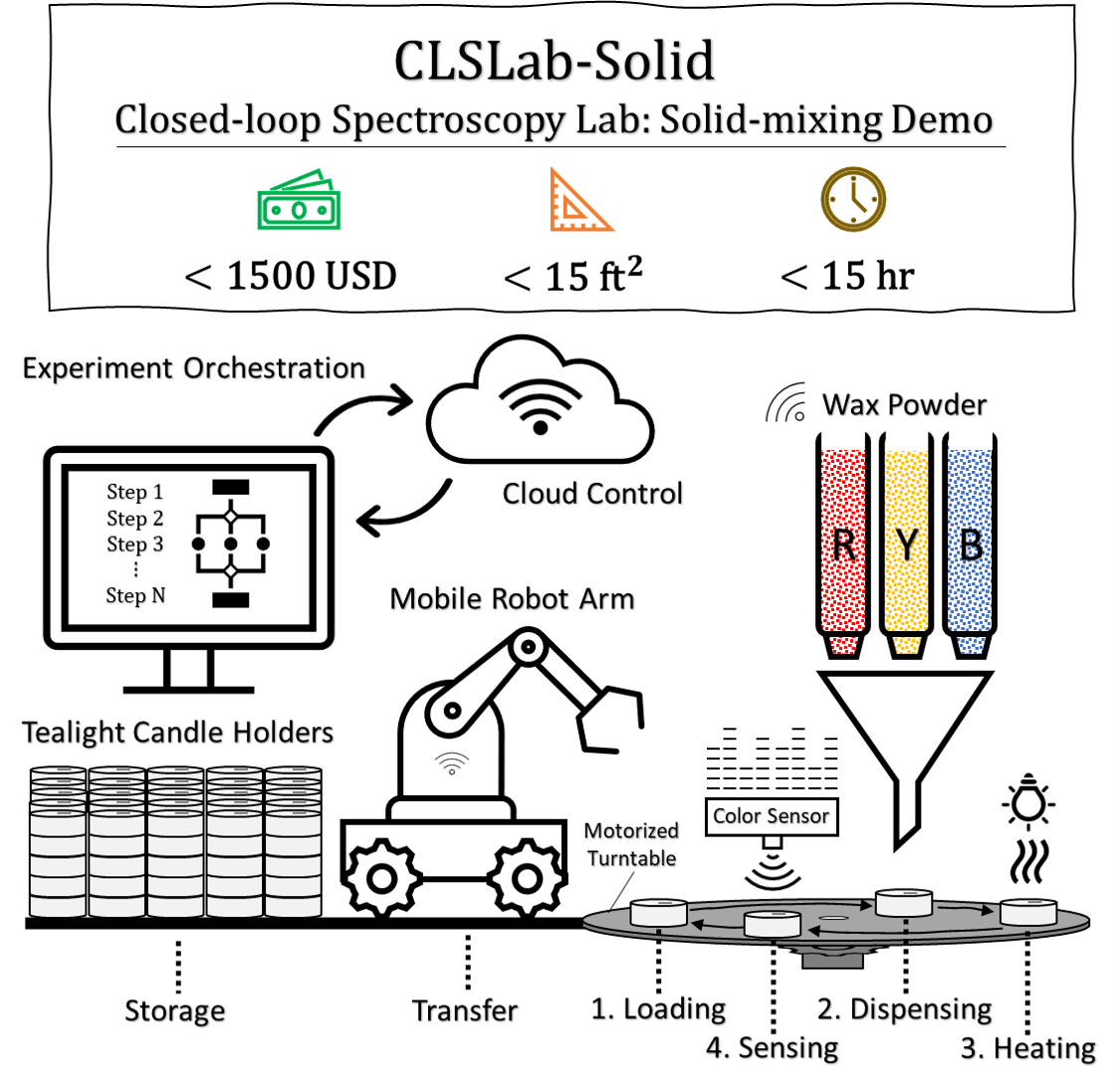
Solid-based color matching |
|
Adjust the composition of red, yellow, and blue powder (e.g., wax) and processing conditions to match a target color |
Development |
Chocolate tensile testing |
Adjust the composition and processing conditions of 3D printed chocolate tensile specimens to tune the microstructure for maximization of tensile strength |
Development |
|
Conductivity |
Adjust the ratio of battery electrolyte reagents to maximize conductivity and redox potential for a target pH |
Planning |
|
Polymer cross-linkage |
Planning |
Functionality#
This refers to the infrastructure-focused capabilities showcased in the AC Dev Lab. The core functionalities (intended as permanent demos) that are planned, development, or available are listed below. These functionalities may either be standalone or part of the workflows listed above.
Name |
Diagram |
Description |
Status |
|---|---|---|---|
Vial transfer (stationary) |
Move a vial between adjacent modules |
Ready |
|
Vial transfer (mobile) |
Move a sample to a different location |
Development |
|
Vial capping/decapping |
Cap or decap a vial |
Development |
|
Tool changing |
Swap a tool on a robotic arm |
Development |
Feedback#
We would love to get suggestions on the types of workflows and functions you’d like to see in the AC Dev Lab! For additional training opportunities offered by the Acceleration Consortium, please navigate to AC Microcourses.